



Teaching
I regularly teach undergraduate and graduate level courses and laboratories in the areas of Robotics, Mechatronics, Controls, and Embedded Systems. The list of recently developed courses is provided below.
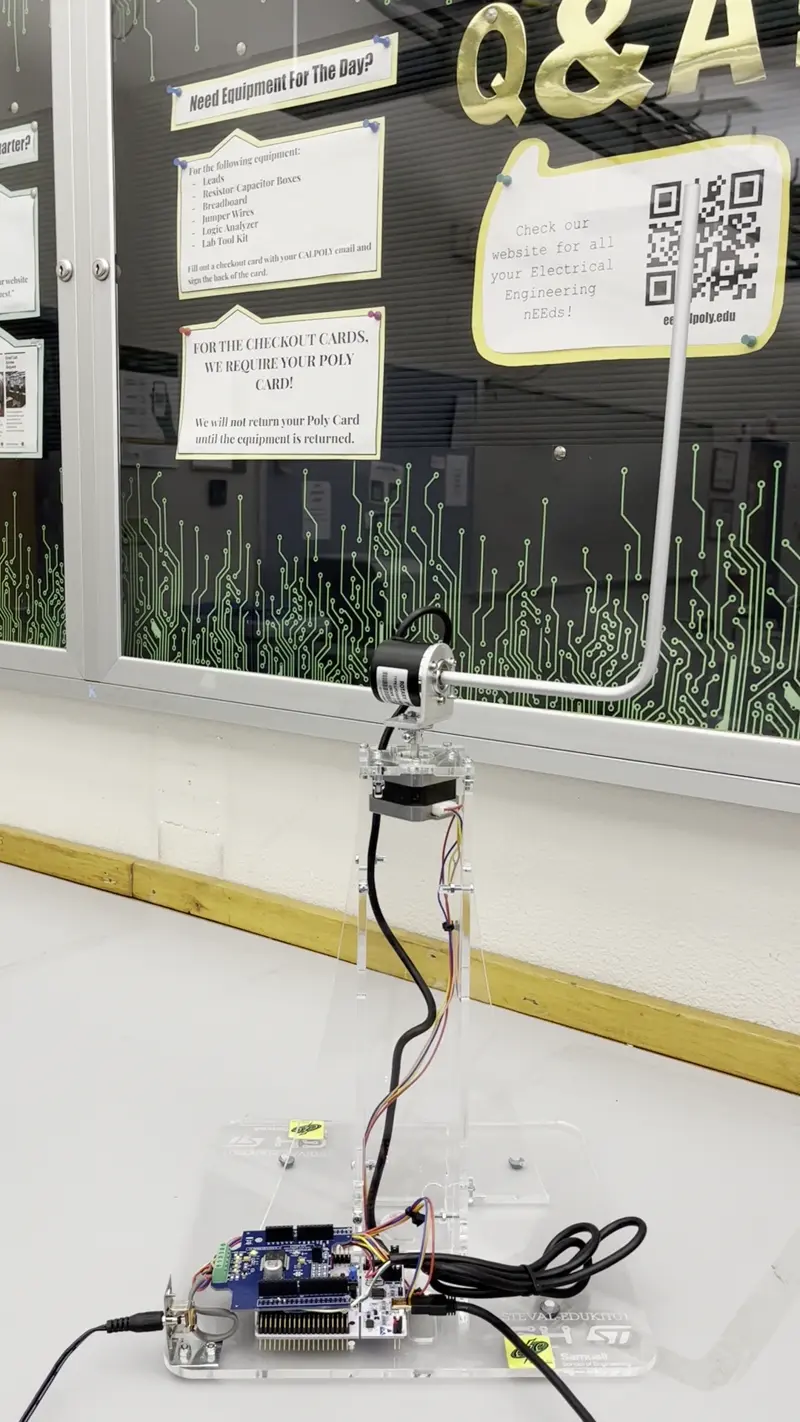
Inverted Pendulum Stabilization (EE302/342)

Vision-Based Robotic Manipulation (EE4470/4471)
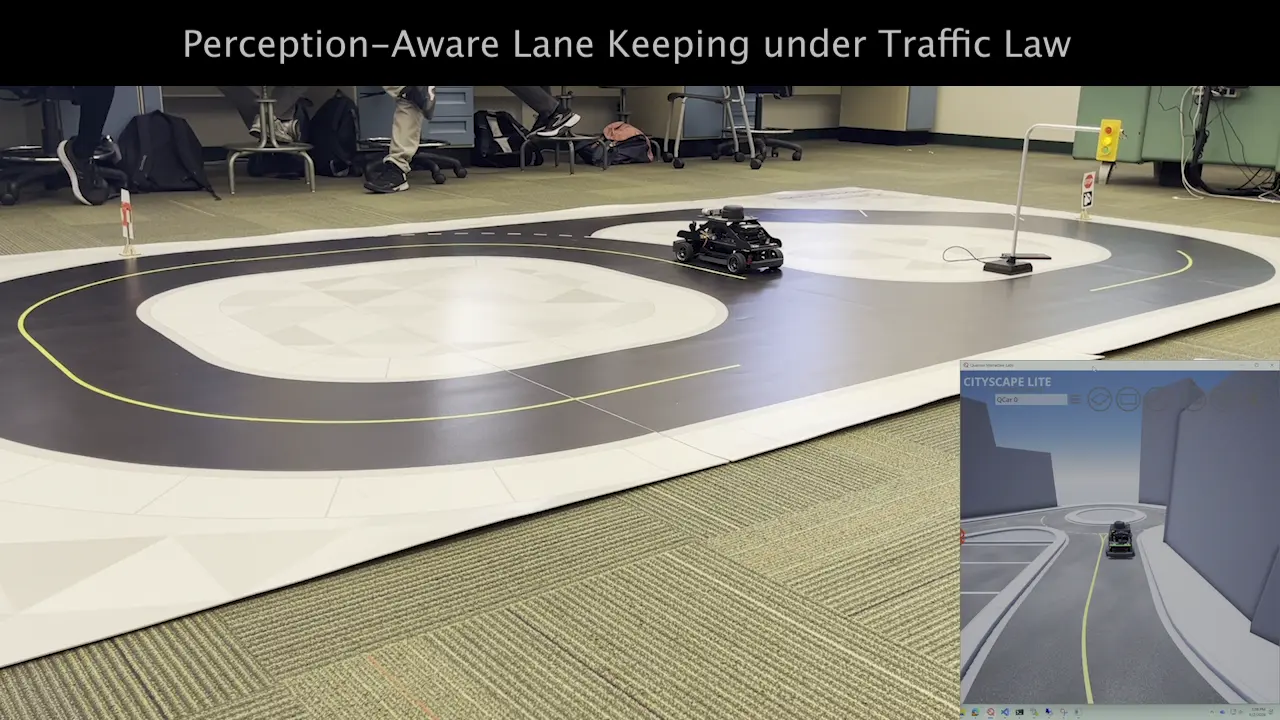
Planning and Control for Autonomous Vehicles (EE470/471)
Vision-Based Robotic Manipulation (EE 4470)
Fall 2024, Fall 2025, Cal Poly
Analysis and development of robotic systems for vision-based manipulation, covering robot kinematics, trajectory planning, robot control, vision sensor models, robot-camera calibration, visual servoing, 3D depth sensing, vision-based grasping, and manipulation planning.
Vision-Based Robotic Manipulation Laboratory (EE 4471)
Fall 2024, Fall 2025, Cal Poly
Laboratory in vision-based robotic manipulation, implementing kinematics, trajectory generation, feedback control, camera calibration, visual servoing, 3D sensing, and grasping on robot arms. Integration of perception, planning, and control for real-time autonomous applications.
Planning and Control for Autonomous Vehicles (EE 470)
Spring 2026, Cal Poly
Introduction to theoretical foundations and engineering practice of autonomous vehicle (AV) systems. Topics include AV hardware/software architectures; sensor modeling and uncertainty characterization; vehicle dynamics and longitudinal/lateral control; state estimation and localization; visual/LiDAR perception; motion planning; vehicle-to-vehicle communication; safety assurance.
Planning and Control for Autonomous Vehicles Laboratory (EE 471)
Spring 2026, Cal Poly
Laboratory work in the design, implementation, and testing of autonomous-vehicle subsystems. Combines virtual simulation with experiments on a physical vehicle platform to interface and calibrate automotive sensors (camera, LiDAR, IMU, GNSS), characterize sensor noise, model vehicle kinematics, implement Kalman-filter-based state estimation, design longitudinal and lateral controllers, perform camera- and LiDAR-based perception, and develop trajectory-planning and lane-keeping pipelines.
Classical Control Systems (EE 302)
Winter 2024, Winter 2025, Spring 2025, Winter 2026, Cal Poly
Introduction to feedback control systems. System modeling. Transfer functions. Graphical system representation. System time response, stability. Root Locus. Frequency response. State-space design.
Classical Control Systems Laboratory (EE 342)
Winter 2024, Winter 2025, Spring 2025, Cal Poly
Laboratory work pertaining to classical control systems, including servo control, transient and frequency responses, stability, and computer-aided analysis of control systems.
Electrical and Electronic Circuits II (EE 215)
Fall 2023, Fall 2024, Cal Poly
Time and frequency domain analysis of linear circuits. Laplace transforms, s-Domain circuit analysis. Network functions, frequency response, Fourier series. Active filter design.
Electrical and Electronic Circuits II Laboratory (EE 245)
Fall 2023, Cal Poly
Lab projects dealing with dynamic circuits in the frequency-domain and the time domain. Frequency domain analysis of two-port circuits. Laplace transforms, s-Domain circuit analysis. Network functions, frequency response, Fourier series. Passive and active filter design.
Senior Project Design Lab I, II (EE 463/464)
Spring 2024, Summer 2024, Cal Poly
Investigation, design, and completion of projects under faculty supervision. Projects typical of problems which graduates must solve in their fields of employment. Project results are presented in a formal report.
Foundations of Robotics (RBE 500)
Fall 2021, Spring 2022, WPI
This course is concerned with fundamentals of robotics. Topics include forward and inverse kinematics, velocity kinematics, introduction to dynamics and control theory, sensors, actuators, probabilistic robotics, fundamentals of robotic vision, and robot ethics. Concepts in these subjects will be applied to robot manipulators and mobile robots. In addition, Robot Operating System (ROS) will be covered, and the concepts learned will be verified using realistic simulators.
Robot Control (RBE 502)
Fall 2021, Spring 2022, Fall 2022, Spring 2023, WPI
This course explores the coupling between control theory and robotics through a balance of theory and application, and provides an in-depth coverage of control design for robotic manipulators and mobile robots. Topics include modeling of robot dynamics, linear and nonlinear control of robotic systems, robust and adaptive control, compliance and force control, control of underactuated robots, and state-of-the-art advanced control concepts. Course projects will emphasize modeling, simulation and practical implementation of control systems for robotic applications.
Industrial Robotics (RBE/ME 4815, MFE 511)
Fall 2022, WPI
This course introduces students to robotics within manufacturing systems. Topics include: classification of robots, robot kinematics, motion generation and transmission, end-effectors, motion accuracy, sensors, safety systems, robot control and automation. The course is a combination of lecture, laboratory and project work, and utilizes industrial robots and programmable logic controllers (PLCs). Through the laboratory work, students will become familiar with robotic programming (using a robotic programming language RAPID), the robotic teaching mode, and PLC programming. The experimental component of the laboratory exercise measures the motion and positioning capabilities of robots as a function of several robotic variables and levels, and it includes the use of experimental design techniques.
Unified Robotics III: Manipulation (RBE 3001)
Spring 2023, WPI
The focus of this course is on robotic arms and robotic manipulation, i.e. the coordinated motion of multiple actuators to execute complex manipulation tasks in the physical space. Topics of position and velocity kinematics will be discussed, and fundamental concepts of robot dynamics and control will be introduced. Additional course topics include motion planning and trajectory generation, vision-based tracking, error sources and propagation. The theoretical methods learned in the classroom will be applied during practical laboratory sessions, which will culminate in the construction and programming of a 3 DoF robotic manipulator. The necessary concepts for robot programming will be introduced in MATLAB and C++.
The Mechatronics Revolution: Fundamentals and Core Concepts
Spring 2020, Fall 2020, Georgia Tech and edX (co-developed with Jonathan Rogers)
In this course, students learn to harness the power of microcontrollers, sensors, and actuators to build useful and interesting robotic devices.
System Dynamics (ME 3017)
Spring 2018, Georgia Tech
Dynamic modeling and simulation of systems with mechanical, hydraulic, thermal, and/or electrical elements. Frequency response analysis, stability, and feedback control design of dynamic systems.